ইটিএইচ জুরিখের গবেষকরা রোবটকে সোজা রাখতে খুব ভালো। 2022 সালে, স্কুলের রোবোটিক্স দল চতুর্মুখী রোবট ANYmal শিখিয়েছিল হাইকিং যেতে কিভাবে না পড়ে পাহাড়ে আরোহণ করুন। নতুন স্কুল গবেষণাস্টুটগার্ট-ভিত্তিক ম্যাক্স প্ল্যাঙ্ক ইনস্টিটিউট ফর ইন্টেলিজেন্ট সিস্টেমের সহযোগিতায় প্রকাশিত, এটি অসম ভূখণ্ড অতিক্রম করার সমস্যার জন্য একটি অনন্য পদ্ধতি গ্রহণ করে।
স্কুল দ্বারা প্রদর্শিত কৃত্রিম পেশী একটি হাইব্রিড ইলেক্ট্রো-হাইড্রোলিক সিস্টেম দ্বারা চালিত হয়। তারা যে পৃষ্ঠটি অতিক্রম করছে তার সাথে স্বয়ংক্রিয়ভাবে সামঞ্জস্য করার ক্ষমতার পাশাপাশি, পা দ্রুত চলে এবং তাদের আরও মানক বৈদ্যুতিক প্রতিকূলের চেয়ে উঁচুতে লাফ দেয়, অতিরিক্ত সেন্সর বা নিয়ন্ত্রণের প্রয়োজন ছাড়াই।
লেগ অ্যাকুয়েটররা আশ্চর্যজনকভাবে সহজ। দলগুলি এগুলিকে “তেল ভর্তি প্লাস্টিকের ব্যাগ হিসাবে বর্ণনা করে, যা বরফের কিউব তৈরিতে ব্যবহৃত হয়।” এই ব্যাগগুলি তারপর ইলেক্ট্রোড দিয়ে আবৃত করা হয়। সত্যি বলতে, পুরো ব্যাপারটা একটু স্কুল বিজ্ঞান প্রকল্পের মতো মনে হয়।
“(O) আমরা যখন ইলেক্ট্রোডগুলিতে একটি ভোল্টেজ প্রয়োগ করি, তারা স্থির বিদ্যুতের কারণে একে অপরের প্রতি আকৃষ্ট হয়,” স্নাতক ছাত্র টমাস বুচনার বলেছেন। “একইভাবে, যখন আমি আমার মাথায় একটি বেলুন ঘষি, তখন একই স্থির বিদ্যুতের কারণে আমার চুল বেলুনের সাথে লেগে থাকে।”
ব্যাগ তারপর প্রসারিত বা সংকুচিত, প্রয়োগ করা ভোল্টেজ উপর ভিত্তি করে. স্ট্যান্ডার্ড বৈদ্যুতিক অ্যাকুয়েটরগুলির বিপরীতে, সিস্টেমটি খুব বেশি তাপ উৎপন্ন করে না।
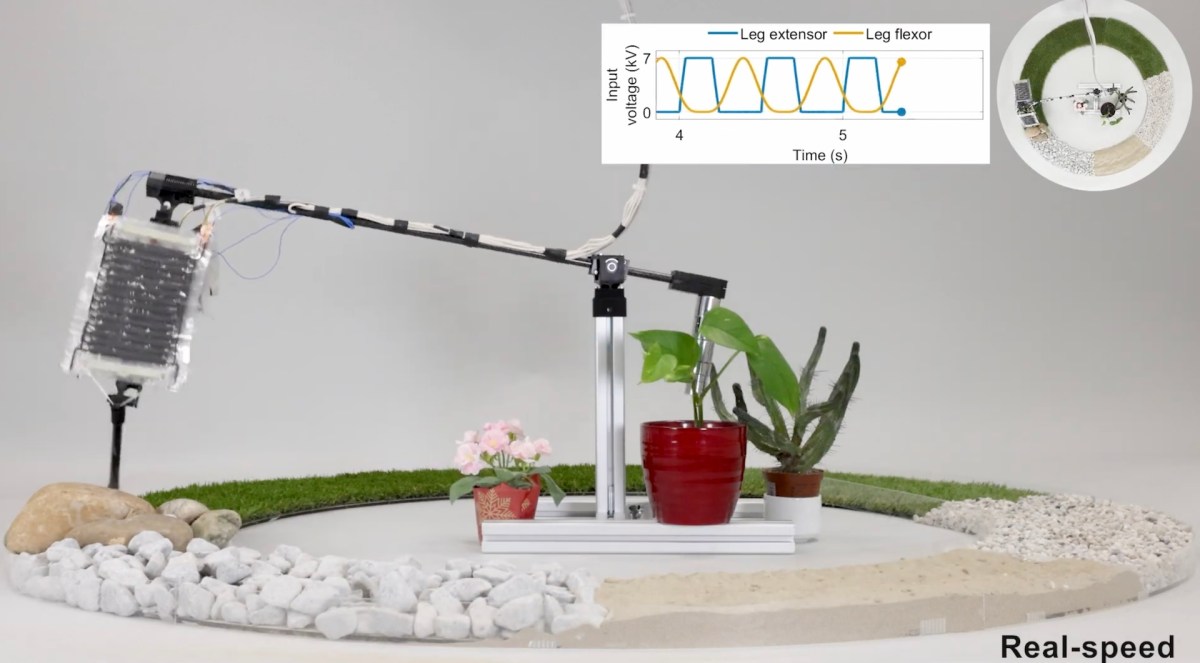
তারপরে অ্যাকুয়েটররা সিস্টেমটিকে অসম ভূখণ্ড অতিক্রম করতে এবং উঁচুতে লাফ দিতে সহায়তা করে। বাস্তব-বিশ্ব ব্যবহারের পরিপ্রেক্ষিতে, যাইহোক, সিস্টেমটিকে এখনও অনেক দূর যেতে হবে।
“বৈদ্যুতিক মোটর দিয়ে হাঁটার রোবটের তুলনায়, আমাদের সিস্টেম এখনও সীমিত। পা বর্তমানে একটি রডের সাথে সংযুক্ত, বৃত্তে লাফ দেয় এবং এখনও অবাধে চলাফেরা করতে পারে না”, ম্যাক্স প্লাঙ্ক ইনস্টিটিউটের অধ্যাপক ক্রিস্টোফ কেপলিংগার বলেছেন। “যদি আমরা রোবোটিক পাকে একটি চতুর্মুখী রোবট বা দুটি পা সহ একটি হিউম্যানয়েড রোবটে একত্রিত করি, সম্ভবত একদিন, যখন এটি ব্যাটারি চালিত হয়, আমরা এটিকে একটি রেসকিউ রোবট হিসাবে স্থাপন করতে পারি।”